


Youth engaged in engineering
 Print
Print Email
EmailYouth at Great Lakes and Natural Resources Camp engaged in an engineering challenge.

Youth who attended the 4-H Great Lakes and Natural Resources Camp (GLNR) in Presque Isle, Michigan, rose to the challenge. Working in pairs, youth built underwater remotely operated vehicles (ROVs). They had 1.5 hours to design, build, test and redesign and improve their underwater ROV. Each pair of youth were given the same amount of PVC pipe in a variety of sizes to build their frame, three motors wired to a tether to provide thrust and a control box with toggle switches that connected to a marine battery that provided power.
Youth learned about the five main parts of an underwater ROV: frame, thrusters, tether, buoyancy and control box. The frame provides mounting surfaces for thrusters and tools. The thrusters provide movement for the ROV and need to be configured to provide forward and backward movement, left and right movement and up and down movement. The tether is a key element in underwater ROVs. The tether is important for protecting the electrical cables and enabling communication between the vehicle and operator. If needed, the tether has an additional role to retrieve the underwater vehicle. If a remotely operated car or airplane stops working, it is generally easy to retrieve: it stops or falls to the earth. When an underwater ROV stops functioning, it may sink and be lost. Buoyancy can be added to make an underwater ROV slowly float when it stops functioning. Underwater ROVs have negative buoyancy – they sink. In order to remain at a stable depth or float, buoyancy can be added. Positive buoyancy means you float and neutral buoyancy means you remain at a stable depth. Lastly, the control box enables communication between the operator and ROV allowing for maneuverability of the vehicle.
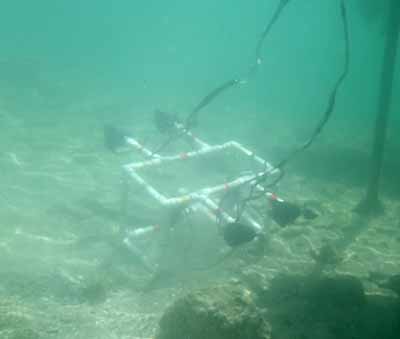
Underwater ROV built by youth at GLNR camp.
In 2015, GLNR campers participating in the Underwater Robotics session faced the unique challenge of designing an underwater ROV capable of maneuvering without added buoyancy. The youth had the opportunity to test their ROV in Lake Esau and make modifications multiple times within the time allotted for the challenge. Youth built upon their understanding of STEM (Science, Technology, Engineering and Mathematics) through the use of the engineering design process. Through the hands-on opportunity to design and test various frames and multiple thruster placements, optimal maneuverability was reached. All participating campers successfully built ROVs that could maneuver in Lake Esau.

Youth making modifications to their underwater ROV.
You can help youth learn more about underwater ROVs by visiting the Marine Advanced Technology Education (MATE) Center website. To engage youth in other engineering challenges, visit the 4-H National Science Experiment website or check out The Power of the Wind or Junk Drawer Robotics at the 4-H Mall. For more ways to share STEM with youth in your life, explore the Michigan State University Extension Science and Technology website. For more information about 4-H learning opportunities and other 4-H programs, contact your county MSU Extension office.






